

KAIST人形机器人研究中心的主要目标是为理解人类腿部系统做出根本性贡献,为机器人系统提供高效率,极高的敏捷性和卓越的多功能性。他们在机械设计、建模、仿真和腿部系统的控制方面提供垂直整合的研究策略。
在机器人最佳运动生成方面,主要目的是提出一种控制器设计方案,该方案为四足机器人提供强大的跑步步态,能够在处理地面高度和刚度变化的同时在很宽的范围内改变运行速度。腿部机器人的总体目标是获得敏捷和侵略性的运动,这需要高GRF(地面反作用力)和快速的速度。必须在适当选择的齿轮比和电机规格下满足此要求。研究人员已经将这个问题作为非线性编程来处理,以优化机器人的性能。
关于SO(3)上的线性多功能一体机方面,为了有效地解决MPC(模型预测控制)问题,需要在某个适当的工作点进行线性化并对变量进行矢量化。
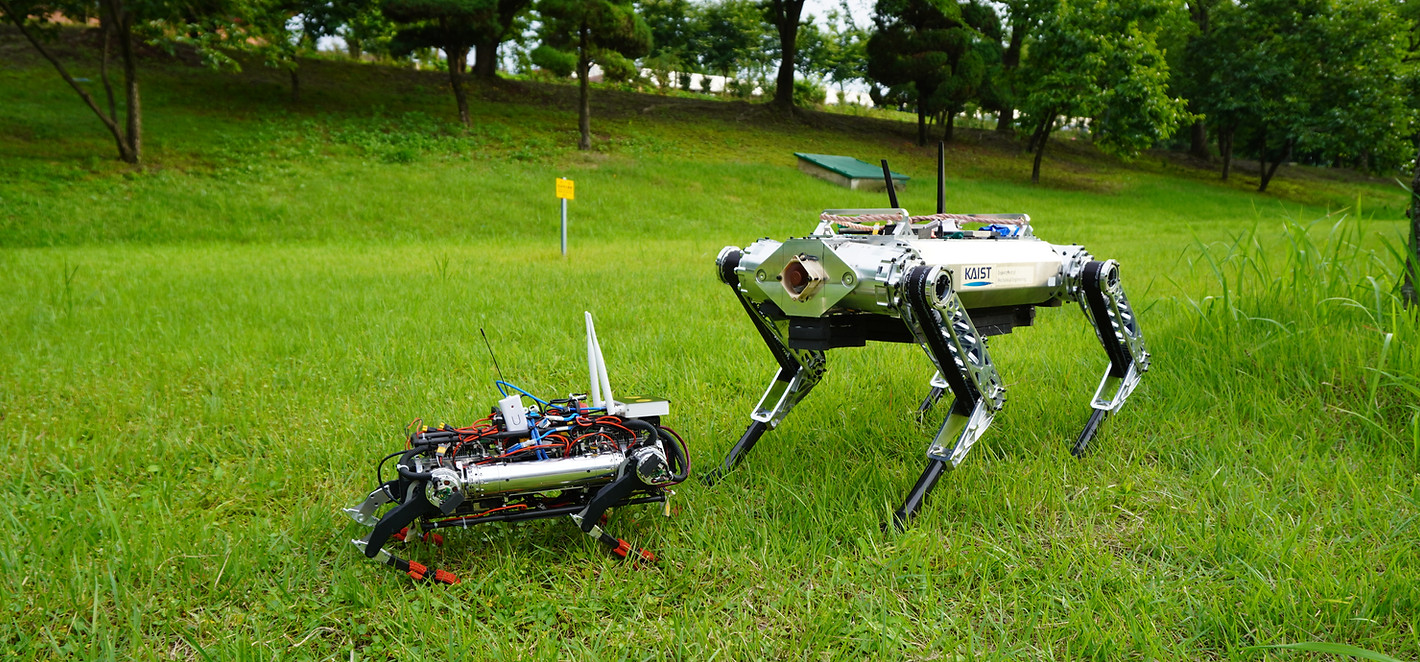
关于集成系统,机器人总是在现实世界中,所以动态机器人设计与控制实验室也做其开发的所有理论的实验。为此,研究人员从头开始制作自己的硬件平台。同时为了解决优化机器人问题,复杂的矩阵操作是必要的。所有矩阵都根据矩阵中零元素的比例分为两组,稠密和稀疏。稀疏矩阵可以带来惊人的高计算节省,具体取决于算法。
The main goal of the KIST Humanoid Robotics Research Center is to make a fundamental contribution to the understanding of human leg systems, providing robotic systems with high efficiency, extreme agility and exceptional versatility. They offer vertically integrated research strategies in mechanical design, modeling, simulation, and control of leg systems.
In terms of optimal motion generation of the robot, the main purpose is to propose a controller design scheme that provides a powerful running gait for the quadruped robot, which can change the running speed over a wide range while handling changes in ground height and stiffness.
The overall goal of the leg robot is to obtain agile and aggressive movements, which require high GRF (ground reaction force) and fast speed. This requirement must be met with an appropriately selected gear ratio and motor specification. Researchers have approached this problem as nonlinear programming to optimize the robot's performance.
Regarding the linear MFP on SO(3), in order to effectively solve the MPC (Model Predictive Control) problem, it is necessary to linearize and vectorize the variables at an appropriate operating point.
Regarding integrated systems, robots are always in the real world, so the Dynamic Robot Design and Control Laboratory also does experiments on all the theories it develops. To do this, the researchers made their own hardware platform from scratch. At the same time, in order to solve the problem of optimizing robots, complex matrix operations are necessary. All matrices are divided into two groups according to the proportion of zero elements in the matrix, dense and sparse. Sparse matrices can lead to surprisingly high computational savings, depending on the algorithm.