创新背景
尽管自动化制造在今天无处不在,但它曾经是奥利弗·埃文斯(Oliver Evans)等发明家开创的一个新生领域。埃文斯被认为创造了第一个完全自动化的工业过程,他建造了一个面粉厂,并在18世纪末逐渐实现了自动化。创造自动化结构或机器的过程仍然是非常自上而下的,需要人类、工厂或机器人来进行组装和制造。
然而,自然界进行组装的方式是普遍的自下而上;动物和植物在细胞水平上是自我组装的,依靠蛋白质自我折叠成目标几何图形,编码所有不同的功能,使人类保持运转。因此,对于更受生物启发、自下而上的组装方法,人类建筑材料需要自己做得更好。不过,让它们以一种可以模仿自然界的多功能性的方式进行可扩展、选择性和可重新编程意味着一些初期问题。
创新过程
麻省理工学院计算机科学和人工智能实验室(CSAIL)的研究人员试图用一种新方法克服这些问题:引入磁性可重新编程的材料,让它们在不同的部件上覆盖,就像机器人立方体一样,让它们自我组装。他们的过程的关键是使这些磁性程序对它们所连接的东西具有高度选择性,使它们能够稳健地自我组装成特定的形状和选定的配置。
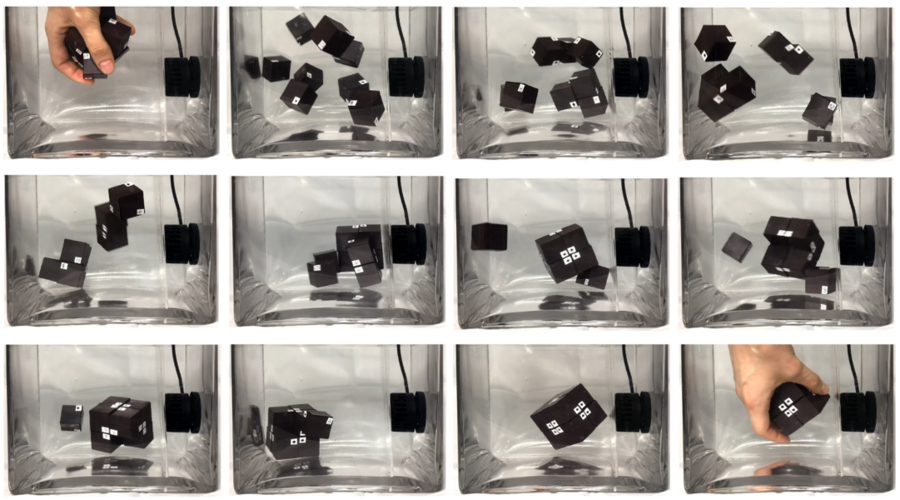
研究人员使用的软磁性涂层材料来自廉价的冰箱磁铁,使他们制作的每个立方体的表面都具有磁性特征。这些特征确保了每一张脸只对所有其他立方体中的另一张脸有选择性地具有吸引力,无论是平移还是旋转。所有的立方体都可以以非常高的分辨率进行磁编程。一旦它们被扔进水箱(在完全随机的干扰下),它们就会相互碰撞。如果它们遇到了错误的伴侣,它们就会离开,但如果它们找到了合适的伴侣,它们就会附着在一起。
使用该团队的磁性绘图机,人们可以把一个立方体插入绘图机,并重新编程。每次绘图器接触材料时,它会在立方体的软磁涂层上创建一个面向“北”或“南”的磁性像素,让立方体在需要时重新使用,以组装新的目标形状。在绘图之前,搜索算法检查每个签名是否与所有之前编程的签名相互兼容,以确保它们有足够的选择性,能够成功地自组装。
通过主动组装,机器人部件可以在线调节它们的行为,以定位、定位和与相邻部件连接,每个模块都需要嵌入硬件,以便进行计算、传感和驱动,从而实现自我组装。更重要的是,在循环中需要一个人或计算机来主动控制嵌入每个部件的执行器,使其移动。尽管主动装配在重新配置各种机器人系统方面取得了成功,但电子设备和执行器的成本和复杂性一直是自我装配硬件在数量上和尺寸上的显著障碍。
有了这些研究人员的被动方法,就不需要嵌入的驱动和控制。一旦被编程,并在随机干扰下被释放,这给了它们相互碰撞的能量,它们就会自己变形,而没有任何引导智能。
为了不需繁复地重复制造,该团队使用的技巧在于磁信号的数学描述,它将每个信号描述为一个二维像素矩阵。这些矩阵确保了任何不应该连接的磁编程部分将相互作用,产生的吸引像素和排斥像素一样多,让它们在平移和旋转中对所有不匹配的部分保持不可知。
创新关键点
这项将阿达玛矩阵应用于该问题的创新是他们能够开发这样一个垂直集成解决方案的关键,首先建立磁模式的排列,在机器人系统的两个磁元素之间提供选择性和唯一的匹配,然后在实验上建立磁系统。
创新价值
这项工作在分辨率、成本和效率方面都向前迈进了一步,研究人员可以自行组装特定的结构。之前的自组装工作通常要求单独的部件在几何上不一样,就像拼图一样,需要单独制造所有的部件。然而,使用磁程序,则可以批量制造同质部件,并对其进行编程,以获得特定的目标结构,重要的是,稍后可以重新编程,以获得新的形状,而不必重新制造部件。
Innovative development of "magnetic programming" enables materials to selectively self-assemble
Researchers at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) have tried to overcome these problems with a novel approach: introducing magnetically reprogrammable materials that can be overlaid on different parts, much like robotic cubes, allowing them to self-assemble. The key to their process is to make these magnetic programs highly selective about what they are connected to, enabling them to robustly self-assemble into specific shapes and selected configurations.
The researchers used a soft magnetic coating material from cheap refrigerator magnets to give the surface of each cube they made a magnetic signature. These features ensure that each face is selectively attractive to only one other face in all the other cubes, either by translation or rotation. All cubes can be magnetically programmed at very high resolution. Once they are dropped into the tank (with completely random interference), they collide with each other. If they meet the wrong mate, they leave, but if they find the right mate, they stick together.
Using the team's magnetic plotter, one can plug a cube into the plotter and reprogram it. Each time the plotter touches the material, it creates a magnetic pixel facing "north" or "south" on the soft magnetic coating of the cube, allowing the cube to be reused when needed to assemble a new target shape. Before drawing, the search algorithm checks that each signature is compatible with all previously programmed signatures to ensure that they are selective enough to successfully self-assemble.
With active assembly, robotic parts can regulate their behavior online to position, position, and connect with neighboring parts, and each module needs to be embedded with hardware for computing, sensing, and actuation to enable self-assembly. More importantly, a person or computer is needed in the loop to actively control the actuators embedded in each part to make it move. Despite the success of active assembly in reconfiguring various robotic systems, the cost and complexity of electronics and actuators has been a significant barrier to self-assembled hardware in both quantity and size.
With the passive approach of these researchers, there is no need for embedded drives and controls. Once programmed and released in response to random disturbances, which give them the energy to collide with each other, they transform on their own without any guiding intelligence.
The trick the team used, in order not to have to reproduce them, was a mathematical description of the magnetic signals, each of which is described as a two-dimensional matrix of pixels. These matrices ensure that any magnetic programming parts that should not be connected will interact, producing as many attractive pixels as repulsive ones, leaving them agnostic to all mismatched parts in translation and rotation.
智能推荐
材料科学创新思维 | 在3D打印中创新使用液体树脂可使材料“自我修复”
2022-09-21新南威尔士大学学者们的研究表明,3D打印中对材料使用液体树脂进行特殊处理可以使材料在损坏时自我修复。
涉及学科涉及领域研究方向工学创新思维 | 高性能水凝胶驱动材料模拟肌肉结构和功能
2022-07-28受肌肉结构的启发,宾夕法尼亚州立大学的研究人员研创出一种纤维驱动器的新设计。它模拟了肌肉纤维的结构,并在能效、驱动应变和机械性能等多个方面比其他现有驱动器更优越。这一结果发表在《自然·纳米技术》(Nature Nanotechnology)杂志上。
涉及学科涉及领域研究方向