创新背景
机器人的手并不像人类的手那样具有感知能力,因此需要新的技术使其能胜任更加灵巧的工作。
创新过程
斯坦福大学的工程师们已经开发出一种含有传感器的电子手套,有一天它可以让机器人的手变得像人类认为理所当然的那样灵巧。
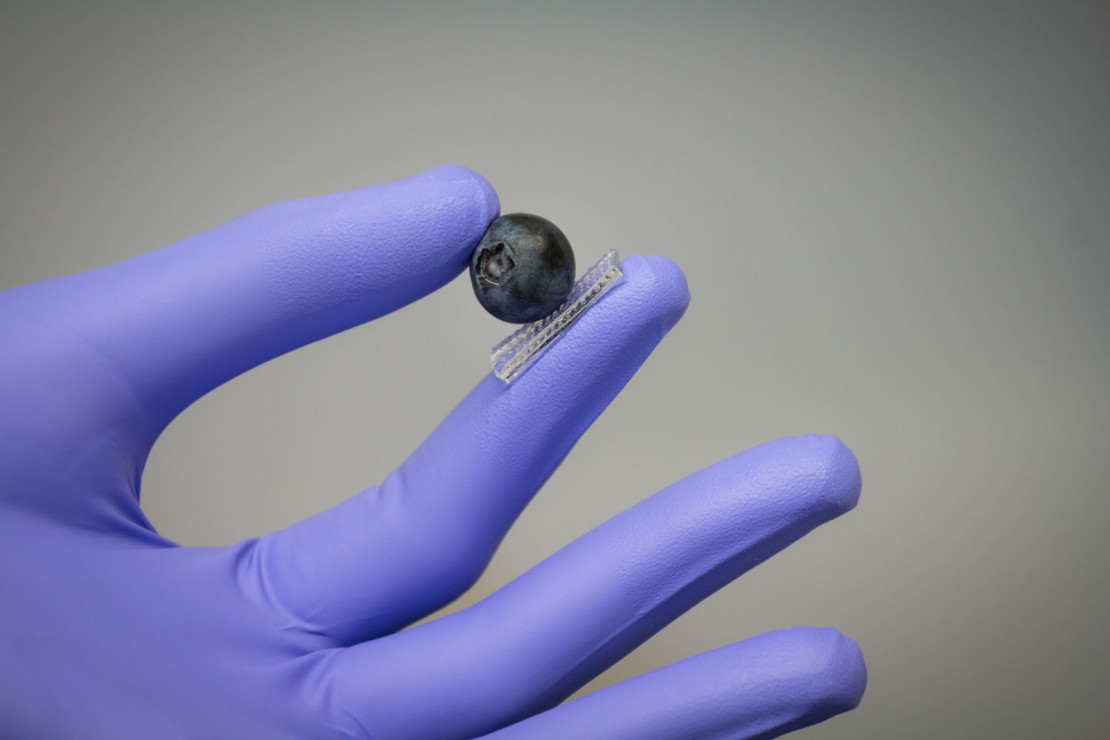
在《科学机器人》杂志的一篇论文中,化学工程师鲍振安和她的团队展示了传感器的良好工作性能,使机器人的手能够触摸到精致的浆果,并在不压扁乒乓球的情况下处理乒乓球。
手套指尖的传感器可以同时测量压力的强度和方向,这是实现手部灵巧性的两个关键品质。研究人员还必须完善自动控制这些传感器的技术,但当他们做到这一点时,一个戴着手套的机器人可以灵活地用拇指和食指夹住鸡蛋,而不会把它摔碎或让它滑落。
我们的皮肤外层布满了传感器,用来检测压力、热量和其他刺激。我们的手指和手掌的触觉传感器特别丰富。这些传感器与被称为棘突的皮肤亚层协同工作,棘突是一种凹凸不平的微观地形,由丘陵和山谷组成。
这种颠簸很关键。当我们的手指接触一个物体时,外层皮肤会向脊柱靠拢。轻微的触摸主要是由靠近山顶的传感器感受到的。更大的压力迫使外层皮肤向下进入棘突的山谷,引发更强烈的触觉。
但是测量压力的强度只是棘肌功能的一部分。这个凹凸不平的小层也有助于揭示压力或剪切力的方向。例如,一根手指朝北按,就会在那些微小山丘的南山坡上产生强烈的信号。这种感知剪切力的能力是帮助我们用拇指和食指轻轻地而坚定地握住鸡蛋的一部分。
博士后学者Clementine Boutry和硕士学生Marc Negre开发了模仿人类这种机制的电子传感器。机器人手套指尖上的每个传感器由三层柔性层组成,它们协同工作。顶部和底部是带电的。研究人员在两个表面上分别铺设了一排电线,就像田野里的一排排一样,然后让这些线互相垂直,形成一个密集的小传感像素阵列。它们还使底部像棘状突起一样凹凸不平。
中间的橡胶绝缘体只是将电极的上层和底层分开。但这种分离是至关重要的,因为近距离接触的电极可以储存电能。当机械手指向下按压时,上面的电极会被挤压得更靠近底部,储存的能量就会增加。底层的山丘和山谷提供了一种将压力强度和方向映射到垂直网格上特定点的方法,就像人类的皮肤一样。
为了测试他们的技术,研究人员把他们的三层传感器放在橡胶手套的手指上,然后把手套放在机器人手上。最终的目标是将传感器直接嵌入机械手的皮肤状覆盖物中。在一项实验中,他们给这只戴着手套的机械手设定了程序,让它轻轻地触摸一颗浆果,而不会损坏它。他们还为戴着手套的手设定了程序,使其举起和移动乒乓球而不压碎它,通过使用传感器来检测适当的剪切力,从而抓住球而不让它掉下来。
创新价值
只要编程得当,戴上目前的触摸感应手套的机械手就可以完成一些重复性的任务,比如从传送带上取下鸡蛋并将它们放入纸箱。这项技术也可以应用在机器人辅助手术中,精确的触摸控制是必不可少的。
创新关键点
机器人手套指尖上的每个传感器由三层柔性层组成,它们协同工作。顶部和底部是带电的。研究人员在两个表面上分别铺设了一排电线,就像田野里的一排排一样,然后让这些线互相垂直,形成一个密集的小传感像素阵列。它们还使底部像棘状突起一样凹凸不平。
Develop an electronic glove to provide the robot with a sense of touch
Engineers at Stanford University have developed an electronic glove containing sensors that could one day allow robotic hands to be as dexterous as humans take for granted.
In a paper in the journal Science Robotics, chemical engineer Zhenan Bao and her team demonstrate the good working performance of sensors that allow the robot's hand to touch delicate berries and handle ping-pong balls without squishing them.
Sensors in the fingertips of the gloves measure both the strength and direction of pressure, two key qualities for achieving manual dexterity. The researchers will also have to perfect the technology to control these sensors automatically, but when they do, a gloved robot can nimbly hold the egg between its thumb and forefinger without smashing it or letting it slip.
The outer layer of our skin is covered with sensors that detect pressure, heat and other stimuli. Our fingers and palms are particularly rich in tactile sensors. These sensors work in conjunction with sublayers of skin called spines, which are bumpy, microscopic terrains made up of hills and valleys.
This bump is critical. When our fingers touch an object, the outer layer of skin draws closer to the spine. The slight touch is mainly felt by sensors near the top of the mountain. More pressure forces the outer skin down into the valley of the spines, triggering a stronger sense of touch.
But measuring the strength of the pressure is only part of the function of the spinous muscle. This bumpy layer also helps reveal the direction of pressure or shear forces. A finger pointing north, for example, produces a strong signal on the southern slopes of those tiny hills. This ability to sense shear force is part of what helps us hold the egg gently and firmly between our thumb and forefinger.
Post-doctoral scholar Clementine Boutry and master's student Marc Negre developed electronic sensors that mimic this mechanism in humans. Each sensor on the tip of the robot glove consists of three flexible layers that work together. The top and bottom are charged. The researchers laid a row of wires on each of the two surfaces, like rows in a field, and then made the wires perpendicular to each other, creating a dense array of small sensing pixels. They also make the bottom bumpy like spines.
A rubber insulator in the middle simply separates the top and bottom layers of the electrode. But the separation is crucial because electrodes in close proximity can store electrical energy. When the manipulator is pointed down and pressed, the top electrodes are squeezed closer to the bottom, increasing the amount of stored energy. The underlying hills and valleys provide a way to map pressure intensity and direction to specific points on a vertical grid, much like human skin.
To test their technique, the researchers placed their three-layer sensor on the fingers of a rubber glove, which was then placed on the robot's hand. The ultimate goal is to embed the sensor directly into a skin-like covering of the manipulator. In one experiment, they programmed the gloved manipulator to gently touch a berry without damaging it. They also programmed the gloved hand to lift and move the ping pong ball without crushing it, by using sensors to detect the proper shear force to catch the ball without dropping it.
智能推荐
机器人+建筑学 | 创新利用“AI+协作机器人”设计制造空中花园
2022-11-24在人工智能和四个协作机器人的帮助下,苏黎世联邦理工学院的研究人员可以设计并制造一个22.5米高的绿色建筑雕塑。
涉及学科涉及领域研究方向机器人+控制科学 | 双足机器人在行走和飞行之间开辟了一种新型的运动方式
2022-10-13加州理工学院的研究人员制造了一种双足机器人,它将行走与飞行相结合,创造了一种新型的运动,使其异常灵活,能够进行复杂的运动。
涉及学科涉及领域研究方向创新开发具有壁虎式握法的机械手
2022-08-16为了创造一种能够以微妙的力度抓取物品的机器人抓手,研究人员将基于壁虎脚趾的粘合剂与定制的机器人手结合起来。
涉及学科涉及领域研究方向利用基于人工智能的机器人系统预防高危人群摔倒
2022-08-17斯坦福大学研究人员开发了一种基于人工智能的机器人系统,可以预测和预防高危人群的摔倒。
涉及学科涉及领域研究方向