创新背景
人类文化源于通过社会共享经验获得的知识。文化传播使社会新成员能够迅速从积累的经验中学习。为了让机器人理解文化传播知识所必需的合作行为,进行文化知识传播非常有必要。
创新过程
法国国家科学院的研究人员Peter Ford Dominey领导团队,为人形机器人Nao开发了一种“自传式记忆”,使其能够将从人类学到的知识传递给其他知识较低的人类,研究成果在2015年的第24届机器人与人类互动交流国际研讨会上展示。“自传式记忆”包括亲身经历过的事件和背景。它可以确定记忆的约会和定位,并确定谁在活动期间在场。对于人类来说,自传体记忆有助于建立个人的个人历史。
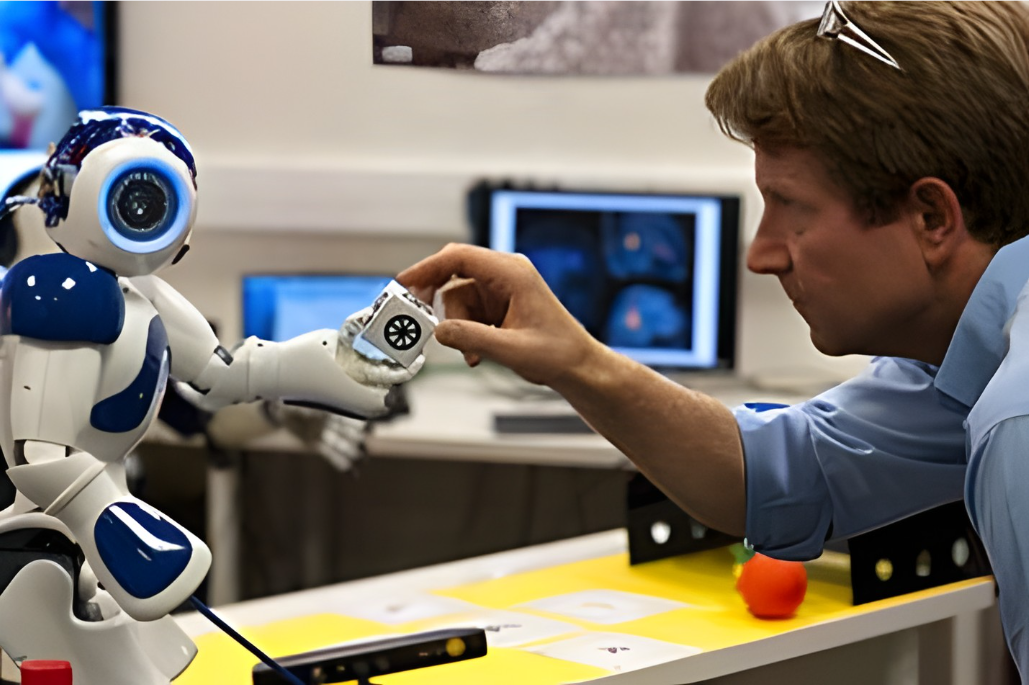
为了让机器人理解文化传播知识所必需的合作行为,研究人员开发了一种系统,人类代理可以通过物理演示将机器人成员放在正确的位置,通过Kinect系统视觉模仿或语音命令来教Nao类似人类的新动作。干细胞与大脑研究所的研究人员建立了这种自传式记忆系统,这些单独的动作被组合成程序后存储在研究人员开发的机器人自传体记忆中,当任务需要时,机器人可以将它们复制给其他人类代理。
这项技术进步可以用于国际空间站的操作,这个机器人是空间站唯一的常任成员,它将在每六个月更换一次的不同机组人员之间进行联络,以传递信息,促进人类与机器人合作。

为了测试系统,研究人员想象了一个可能发生在国际空间站上的场景。因为机组人员每六个月更换一次,信息传输是至关重要的。如果电子卡损坏,Nao会成为科学家的助手,按照科学家的指示,在维修过程中携带或手持卡片的一部分。如果同样的故障再次发生,这一事件的记忆将使机器人能够使用视频系统向新成员展示修理情况。它还可以回应关于之前事件的问题,同时帮助进行新的修复。如果发生了稍微不同的故障,机器人可以分享它对这类故障的专业知识,同时记录解决这个新问题所需的步骤,然后把它们传给下一组的科学家。
测试结果证明了该系统的可行性,并表明这种类人机器人代表了知识积累和转移的潜在解决方案。研究人员下一步计划在零重力的真实太空操作条件下测试他们的Nao机器人。并且,团队还想开发机器人的另一个功能,使它成为个人记忆助手,帮助老年人提高生活质量。
创新关键点
通过开发自传式记忆系统,使机器人能够存储传播人类知识,增强人机互动联系,方便空间站中的宇航员工作。
智能推荐
P2R-Net新方法根据人体轨迹信息模拟房间内物品摆设
2022-07-27来自慕尼黑工业大学、香港中文大学(深圳)的研究者提出了一种新的场景模拟的方法——P2R-Net :仅仅依靠对3D人体姿态的观察,就能估计与人交互的物体在场景中的摆放位置,该模型的特征是其类别和定向 3D 边框。结果表明,P2R-Net 在 PROX 数据集和 VirtualHome 平台上始终优于基线。该研究入选了 ECCV 2022。
涉及学科涉及领域研究方向通过重新实现和集成分页在边缘设备上训练神经网络
2022-07-26UC 伯克利的几位研究者提出了一种用于深度神经网络的图形级编译器——PORT,它重写了大型模型的训练 DAG以适应边缘设备的内存限制,同时保持高能效,通过重新实现和分页,达到了以最小的能耗扩展有效的内存容量的效果。
涉及学科涉及领域研究方向压阻式传感器帮助机器人感知运动和位置
2022-08-17麻省理工学院的研究团队以kirigami剪纸为灵感,将具有“压阻性”的导电材料片切割成可灵活拉伸的矩形条,制作出了一种弹性传感器,从而为机器人提供不依靠视觉系统就能够对运动和位置进行感知的能力。这是迈向更复杂的自动化控制的第一步。
涉及学科涉及领域研究方向机器人+生物工程 | 创新开发具有活皮肤组织的机器人手指
2022-11-07机器人手指具有活细胞和支持在其上生长的有机材料,可实现理想的形状和强度。
涉及学科涉及领域研究方向