创新背景
kirigami即剪纸,是纸艺的另一种类型,借助工具裁剪后,呈现出赏心悦目的装饰品。剪纸结构在收纳时呈2D平面形状,裁剪后,结构刚度降低,具有更好的可延展性。比如婚庆拉花,可以由扁平状拉伸成网状结构。
Katia Bertoldi合理地切割薄塑料板上的切口,形成一系列顶点铰接的四边形。调整层级的几何参数、材料的厚度和响应,可以实现各种不同程度的屈曲。多个层级进行组合,可以实现机械性能的调整。此特性为机器人研究、超材料设计提供了灵感。
创新过程
麻省理工学院的研究人员首次使一个软机械臂能够通过利用它自己的“传感器”皮肤的运动和位置数据来理解它在3D空间中的配置。其研究论文发表在《IEEE机器人与自动化通讯》期刊上。
研究人员展示了一个覆盖在机器人身体上的软传感器系统,以提供“本体感觉”——即对其身体的运动和位置的感知。这种反馈会与一种新型的深度学习模型相结合,该模型会筛选噪声并捕捉清晰的信号,以估计机器人的3D配置。研究人员在一个类似象鼻的柔软机械臂上验证了他们的系统。当机械臂自主摆动和伸展时,可以预测自己的位置。而且传感器可以使用现成的材料制造,这意味着任何实验室都可以开发自己的系统。

kirigami为灵感的弹性传感器
软机器人的一个长期目标是完全集成身体传感器。传统的刚性传感器降低了软机器人机体的自然柔顺性,使其设计和制造复杂化,并可能导致各种机械故障。基于软材料的传感器是一个更合适的选择,但其设计需要专门的材料和方法,这使得许多机器人实验室难以制造和集成到软机器人中。
在这项研究中,研究人员发现,一种可以在任何地方买到的用于电磁干扰屏蔽的导电材料片具有“压阻性”,这意味着它们在受到拉伸时电阻会发生变化。如果把它们放在机器人躯干的某些位置,它们就可以制造出有效的软传感器。当传感器因拉伸和压缩而变形时,其电阻转换为特定的输出电压。然后,电压被用作与该运动相关的信号。
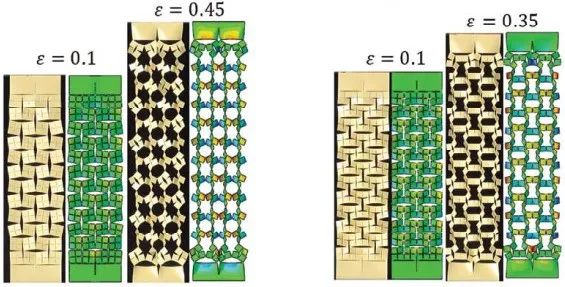
但是这种材料的弹性不大,这就限制了它在软机器人技术中的应用。受kirigami(一种折纸的变体,包括在材料上切割)的启发,研究人员设计并激光切割了导电硅片的矩形条,形成各种图案,比如一排排的小孔或像链条栅栏一样纵横交错的切片。这使得它们更加灵活、可拉伸。
机器人躯干由三个部分组成,每个部分有四个用于移动手臂的流体驱动器(共12个)。他们在每个部分上融合了一个传感器,每个传感器覆盖并从软机器人内嵌的驱动器收集数据。他们使用了“等离子体键合”技术,该技术为一种材料的表面注入能量,使其与另一种材料键合。大约需要几个小时来塑造几十个传感器,这些传感器可以使用手持等离子体粘合设备连接到软机器人上。

“学习”配置
实验表明,传感器确实捕捉到了躯干的一般运动,但也产生了很多噪音。为了仅使用传感器来估计软机器人的结构,研究人员建立了一个深度神经网络来完成大部分繁重的工作,通过筛选噪声来捕捉有意义的反馈信号。研究人员开发了一个新的模型来从运动学上描述软机器人的形状,这大大减少了他们的模型处理所需的变量的数量。
在实验中,研究人员让机器人躯干在大约一个半小时的时间里随意摆动和伸展。他们使用传统的动作捕捉系统来获取地面真实数据。在训练过程中,该模型分析来自其传感器的数据以预测配置,并将其预测结果与同时收集的地面真实数据进行比较。在此过程中,模型“学会”将传感器的信号模式映射到真实世界的配置。结果表明,对于一定稳定的构型,机器人的估计形状与地面真实形状相匹配。

目前,神经网络和传感器皮肤对捕捉细微运动或动态运动都不敏感。但是,就目前而言,这是基于学习的软机器人控制方法重要的第一步。
创新关键点
研究团队以kirigami剪纸为灵感,将具有“压阻性”的导电材料片切割成可灵活拉伸的矩形条,制作出了一种弹性传感器,从而为机器人提供不依靠视觉系统就能够对运动和位置进行感知的能力。这是迈向更复杂的自动化控制的第一步。
智能推荐
通过转换图像中的液体颜色使机器人感知透明液体
2022-08-03在卡内基·梅隆大学(CMU)和圣母大学的一篇论文中,研究者提出了一种在透明容器中感知透明液体(如水)的方法。研究者通过训练一个将有色液体图像转换为透明液体图像的模型,使得机器人能够理解透明液体。该研究由 LG Electronics 和美国国家科学基金会提供资助,并于 5 月份发表在 IEEE 国际机器人和自动化会议上。该论文已被机器人领域国际顶会 ICRA 2022 接收。
涉及学科涉及领域研究方向机器人+生物工程 | 创新开发具有活皮肤组织的机器人手指
2022-11-07机器人手指具有活细胞和支持在其上生长的有机材料,可实现理想的形状和强度。
涉及学科涉及领域研究方向通过磁力产生扭矩的靶向给药微型机器人
2022-07-29来自斯坦福大学的研究团队开发出了一种微型机器人。这个由磁场驱动的机器人能够在人体内持续运动,并且能够通过磁力产生扭矩改变运动方向和越过障碍。通过改变磁场的强度和方向,机器人能够单次移动10倍于自身长度的距离。这一最新研制的机器人,是该团队开发过的最强大、功能最多的无线机器人。研究成果刊登在在《自然·通讯》(Nature Communications)杂志上。
涉及学科涉及领域研究方向机器人+海洋科学 | 利用“追踪海上机器人”研究幼虫
2022-08-24加州大学戴维斯分校的科学家们正在旧金山北部的博德加湾(Bodega Bay)的海洋中部署“机器人幼虫”,类似“小黄人”的机器人揭示了海洋幼虫惊人的移动方式。
涉及学科涉及领域研究方向