创新背景
机器人越来越多地应用于医学领域,为医学发展带来了极大的便利。许多机器人的制造都具有仿生性质,从自然界的生物身上获取灵感,可以帮助机器人领域多样化发展。
创新过程
多伦多大学密西沙加分校连续机器人实验室的主任Jessica Burgner-Kahrs带领团队从动物身上获取灵感,制造了一种纤细、灵活、可扩展的连续机器人。连续机器人和人形机器人不同,它的身体细长且无肢,像柔软的曲线,可以进入传统机器人难以到达的地方。
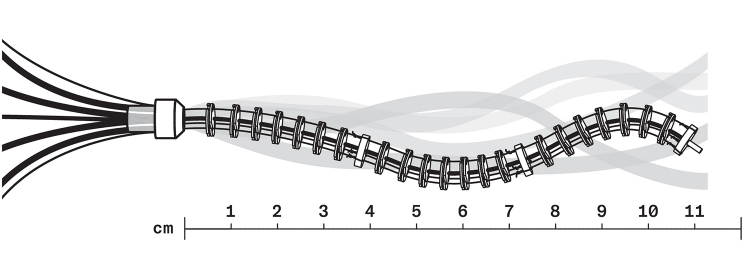
机器人的驱动肌腱直径只有几毫米,长度范围在15到70毫米之间,可以像触手一样运动,适用于外科手术和工业。对于一位需要切除脑肿瘤的神经外科医生来说,使用传统的刚性手术工具,必须冒着损坏重要组织的风险沿着直通的路径进入大脑到达癌性肿块。细长的连续机器人可以作为外科医生的助手,在外科医生的指导下,沿着重要组织周围走一条蜿蜒的路径,到达精确的手术部位,接触到以前无法手术的脑肿瘤部位,推动可手术对象范围扩大。
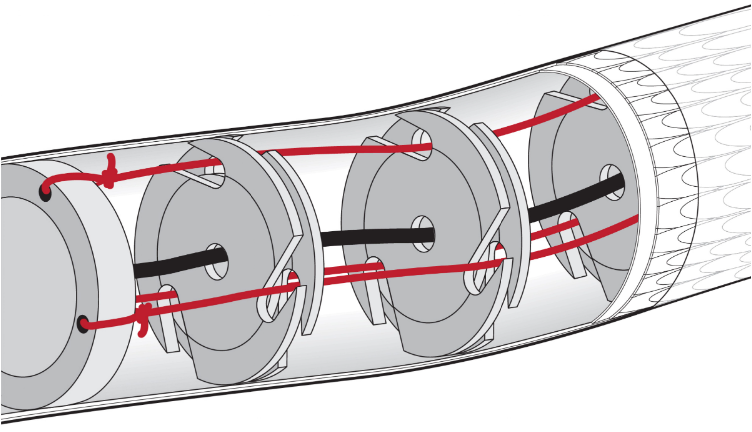
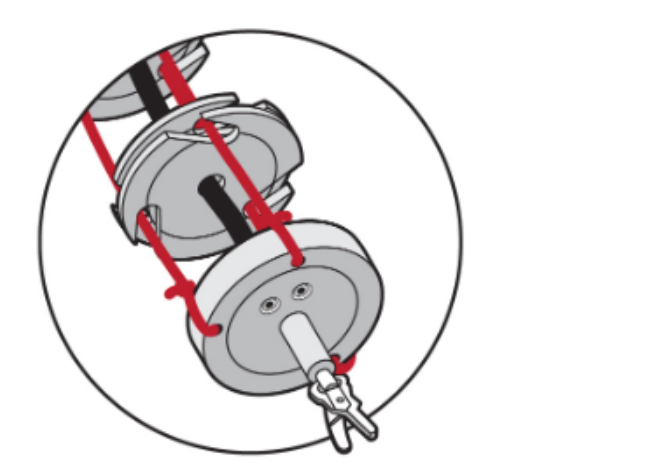
驱动肌腱的线穿过机器人身体,连接到身体每个部分末端的较厚圆盘上。螺纹圆盘控制机器人的各个部分,可以被拉动并使机器人弯曲到不同的方向。每个圆盘内的磁铁以交替的极性排列,确保无论机器人段的长度如何,圆盘都保持等距。这有助于机器人根据需要弯曲,并以跟随动作穿越曲线路径。实验室开发了一套夹在两层硅胶之间的重叠鳞片,当在硅胶层之间施加真空时,灵活的机器人会变得僵硬。
实验室还开发了一种配备传感器的连续机器人,这些机器人可以部分地转向自己。外科医生使用计算机远程操作机器人,机器人就会知道如何避开障碍物并识别其目的地。例如,外科医生可以部署其中一个机器人从腹部收集组织样本,或者将癌症药物直接注射到肺部的肿瘤中。
连续机器人在其他领域也可以使用在人体之外也有用途。它可以滑过喷气发动机的内部,检查其损坏情况。研究团队正在试验更灵活、更可扩展的新形式,根据折纸开发出新的设计,可以使机器人伸长十倍但重量更轻,具有潜在的搜索和救援应用。
创新关键点
创新设计开发可弯曲、可扩展却细长柔软的连续机器人,拓展机器人的使用范围,用于医学领域可帮助医生更高效地进行手术。
智能推荐
压阻式传感器帮助机器人感知运动和位置
2022-08-17麻省理工学院的研究团队以kirigami剪纸为灵感,将具有“压阻性”的导电材料片切割成可灵活拉伸的矩形条,制作出了一种弹性传感器,从而为机器人提供不依靠视觉系统就能够对运动和位置进行感知的能力。这是迈向更复杂的自动化控制的第一步。
涉及学科涉及领域研究方向通过重新实现和集成分页在边缘设备上训练神经网络
2022-07-26UC 伯克利的几位研究者提出了一种用于深度神经网络的图形级编译器——PORT,它重写了大型模型的训练 DAG以适应边缘设备的内存限制,同时保持高能效,通过重新实现和分页,达到了以最小的能耗扩展有效的内存容量的效果。
涉及学科涉及领域研究方向结合视觉传感器和神经网络的新系统使机器人具有塑造弹性物体的能力
2022-08-17研究团队建立的RoboCraft新系统,可以通过视觉传感器“看见”,然后利用基于图形的神经网络进行学习,再通过算法规划机器人的行为。这个新系统可以让机器人处理类似于橡皮泥的柔软材质,为机器人学习如何实现复杂的家庭或工业任务奠定了基础。
涉及学科涉及领域研究方向