创新背景
自从跳跃机器人产生以来,相关研究不断地利用仿生或科学技术提高其跳跃高度,新元件使用是跳跃机器人提升性能的有效途径。
创新过程
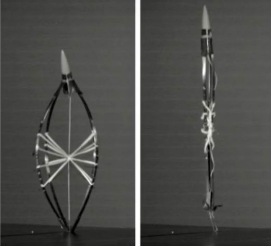
2022年4月27日,《自然》杂志发表了加州大学圣巴巴拉分校和迪士尼研究中心的合作研究成果《跳跃机器人通过机构重复冲程克服生物限制》,展示了工程跳跃机器人最新的跳跃高度,成果设备可以达到33米高。
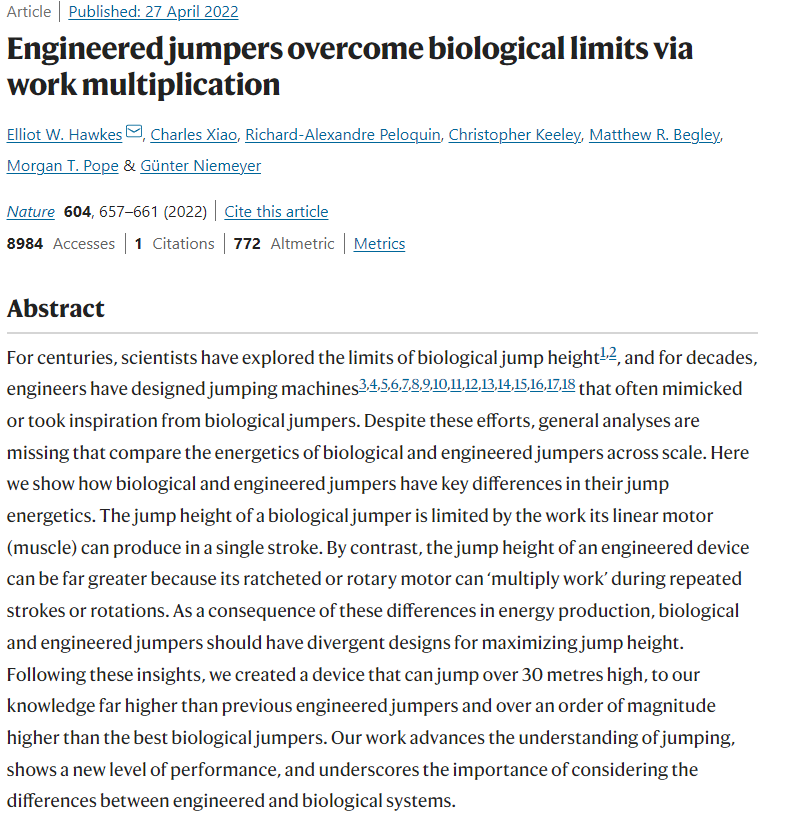
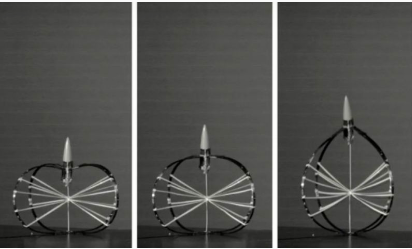
跳跃机器人仅0.3米高,重约30克,主要由弹簧碳纤维弓和橡皮筋组成,可以允许系统存储能量。机器人中心安装旋转电机、电池和一个连接顶部与底部绳索的闩锁装置,整体形状像多张弓组成的装置。

新设备脱离以往对动物跳跃的高度依赖,使用小功率马达和大量技术相结合。准备起跳时,机器人会急速旋转马达,绞紧绳索并压扁蓄力,大约 9 毫秒内释放从 0 加速到 28 m/s。旋转电机和一些连接到弹簧的齿轮,保证设备可以在较长的时间内使用以尽量少的功率来存储电机旋转时的大量能量。
新型跳跃机器人明晰生物机器人和工程机器人之间的差别,帮助拓展工程机器人的研究设计。研究人员认为,设备利用高度弹跳力或许更适合进入太空探索领域。例如,月球重力低阻力小,机器人的跳跃高度或许能有更高突破。
创新关键点
摆脱仿生依赖,专注工程跳跃技术探索提高机器人跳跃高度。
The rotating motor increases the robot's jump height
On April 27, 2022, "Nature" published the collaborative research result of the University of California, Santa Barbara and Disney Research Center, "Engineered jumpers overcome biological limits via work multiplication", showing the latest jumping height of engineering jumping robot, achievements The device can reach a height of 33 meters.
The jumping robot is only 0.3 meters tall and weighs about 30 grams. It is mainly composed of spring carbon fiber bows and rubber bands, which can allow the system to store energy. At the center of the robot is a rotating motor, battery, and a latch that connects the top and bottom ropes, and is shaped like a set of bows.
The new device breaks away from the previous high dependence on animal jumping, using a combination of low-power motors and a large number of technologies. When ready to take off, the robot spins the motor rapidly, twisting the rope and squashing the charge, releasing the acceleration from 0 to 28 m/s in about 9 milliseconds. The rotating motor and some gears connected to springs ensure that the device can be used over a longer period of time with as little power as possible to store a large amount of energy as the motor rotates.
The new jumping robot clarifies the difference between biological robots and engineering robots, helping to expand the research and design of engineering robots. The researchers believe that the device may be more suitable for entering the field of space exploration by using a high degree of bouncing force. For example, the moon has low gravity and low resistance, and the jump height of the robot may have a higher breakthrough.
智能推荐
结合视觉传感器和神经网络的新系统使机器人具有塑造弹性物体的能力
2022-08-17研究团队建立的RoboCraft新系统,可以通过视觉传感器“看见”,然后利用基于图形的神经网络进行学习,再通过算法规划机器人的行为。这个新系统可以让机器人处理类似于橡皮泥的柔软材质,为机器人学习如何实现复杂的家庭或工业任务奠定了基础。
涉及学科涉及领域研究方向通过重新实现和集成分页在边缘设备上训练神经网络
2022-07-26UC 伯克利的几位研究者提出了一种用于深度神经网络的图形级编译器——PORT,它重写了大型模型的训练 DAG以适应边缘设备的内存限制,同时保持高能效,通过重新实现和分页,达到了以最小的能耗扩展有效的内存容量的效果。
涉及学科涉及领域研究方向机器人+海洋科学 | 利用“追踪海上机器人”研究幼虫
2022-08-24加州大学戴维斯分校的科学家们正在旧金山北部的博德加湾(Bodega Bay)的海洋中部署“机器人幼虫”,类似“小黄人”的机器人揭示了海洋幼虫惊人的移动方式。
涉及学科涉及领域研究方向