创新背景
生物机器人利用单细胞打造而成,具有特殊功能特性。它们能够完成普通仿真机器人所不能完成的任务,通过光和电磁刺激来激发化学反应。生物机器人的最终研究目标是使其具备组装微机器组件的能力。
创新过程
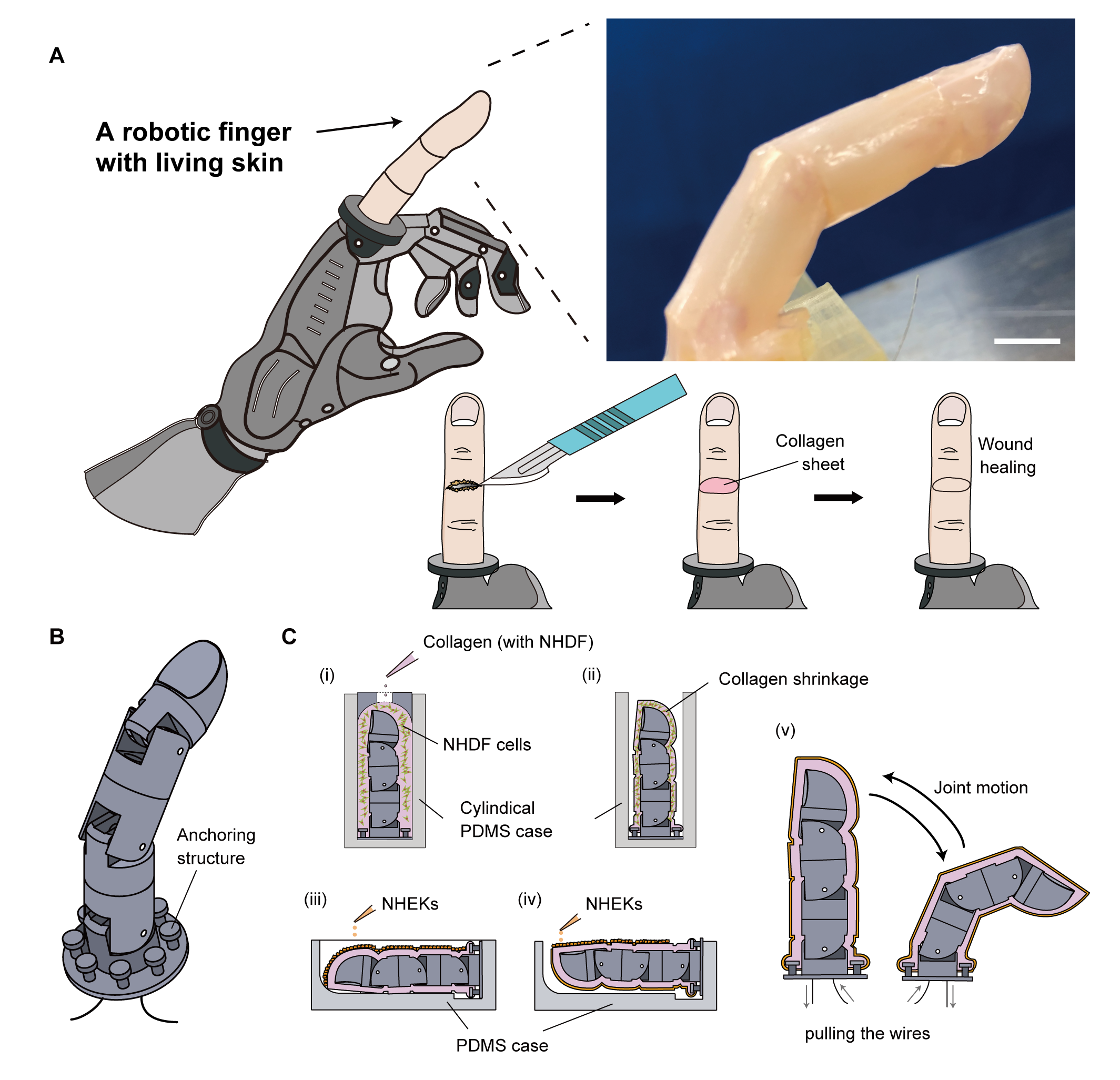
东京大学的研究人员汇集了机器人和组织培养的知识,创建了一个覆盖着活皮肤组织的可控机器人手指。机器人手指具有活细胞和支持在其上生长的有机材料,可实现理想的形状和强度。
由于皮肤柔软甚至可以自愈,手指可用于需要轻柔触感和坚固性的应用。研究目标是在未来的迭代中添加其他类型的细胞,使设备能够像我们一样进行感知。
生物混合机器人是机器人和生物工程的交叉成果。东京大学的研究人员探索人造肌肉、合成气味受体、实验室培育的肉类等,希望能够帮助对皮肤损伤(如深伤口和烧伤)的医学研究。
机器人手指可以像人的手指一样铰接,并被一种可以自我修复的人造皮肤覆盖。皮肤模型是一个复杂的三维矩阵,在手指本身上原位生长。它不是单独生长的,可以切成一定大小并粘附在设备上,研究保证其覆盖完整性和锚定的牢固性。

三维皮肤模型的合成皮肤由水凝胶轻质胶原蛋白基质制成,其中生长着几种被称为成纤维细胞和角质形成细胞的活皮肤细胞。研究是第一次将这种材料用于工作机器人,合成皮肤直接生长在机器人组件上,极具挑战性,需要专门设计的结构才可以将胶原蛋白基质锚定在它们上面。
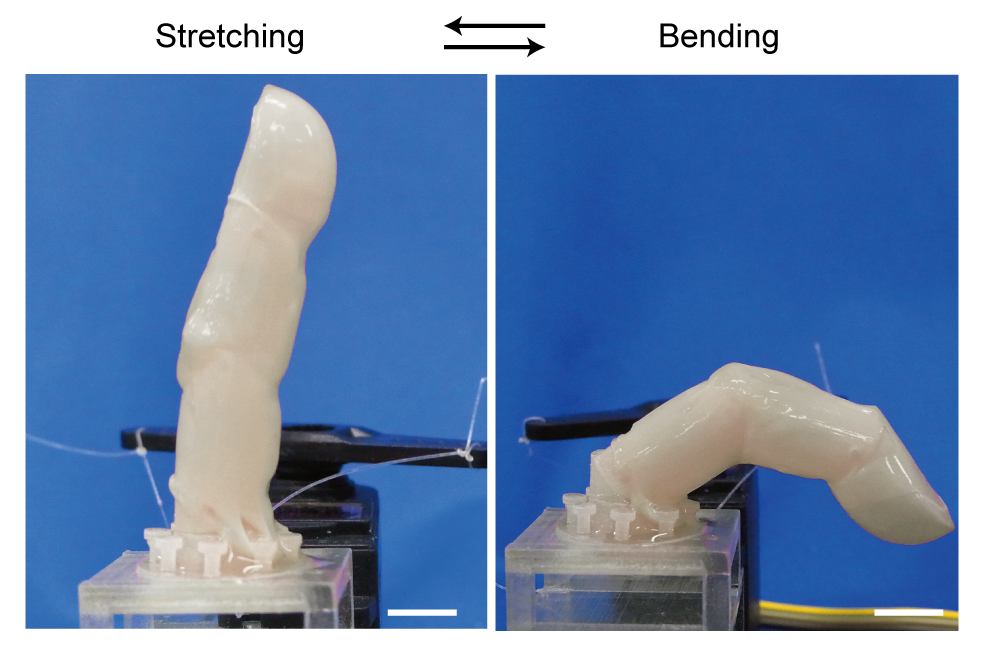
机器人皮肤像真正的皮肤一样柔软,如果以某种方式被割伤或损坏,可以自我修复。研究人员认为它可能在原位可修复,这一特性将在各种行业中具有广泛作用。研究的下一个目标是通过复制皮肤中的一些器官开发更先进的版本,如感觉细胞,毛囊和汗腺等,并尝试涂覆更大的结构。
创新价值
研究的主要长期目标是为先进制造业开辟新的可能性。拥有类人操纵器可以实现目前只有高技能专业人员才能实现的自动化。化妆品、制药和再生医学等其他领域也可能受益。这可能会降低这些领域研究的成本、时间和复杂性,甚至可以减少对动物试验的需求。
智能推荐
利用人工智能和机器人快速识别染病植株
2022-08-18康奈尔大学的生物学家和科学家开发了一项技术,可以利用机器人和人工智能来识别感染了毁灭性真菌的葡萄植物。这项工作大大加快了葡萄育种和遗传学工作的步伐。
涉及学科涉及领域研究方向P2R-Net新方法根据人体轨迹信息模拟房间内物品摆设
2022-07-27来自慕尼黑工业大学、香港中文大学(深圳)的研究者提出了一种新的场景模拟的方法——P2R-Net :仅仅依靠对3D人体姿态的观察,就能估计与人交互的物体在场景中的摆放位置,该模型的特征是其类别和定向 3D 边框。结果表明,P2R-Net 在 PROX 数据集和 VirtualHome 平台上始终优于基线。该研究入选了 ECCV 2022。
涉及学科涉及领域研究方向通过重新实现和集成分页在边缘设备上训练神经网络
2022-07-26UC 伯克利的几位研究者提出了一种用于深度神经网络的图形级编译器——PORT,它重写了大型模型的训练 DAG以适应边缘设备的内存限制,同时保持高能效,通过重新实现和分页,达到了以最小的能耗扩展有效的内存容量的效果。
涉及学科涉及领域研究方向机器人+护理学 | 全新自动刷牙机器人可保持牙齿健康
2022-11-14为了减轻照顾老年人或残疾人的护理人员的责任,研究人员开发全自动烟嘴式牙刷来保持牙齿健康和光泽。这款自动牙刷只要将牙刷放在嘴里,它就会自行完成工作,而无需进行刷牙动作。
涉及学科涉及领域研究方向